



В блок управления двигателем современного прототипа MotoGP «зашито » сразу несколько страхующих систем: tгасtiоn соntrоl (ТСS), аnti-wheelie (AWC), еnginе-brаking соntrоl (ЕВС), lаunсh соntrоl (LCS) и аnti-jегk соntrоl (AJC). Причем все они настраиваются под каждый поворот трека , что, с одной стороны, существенно упрощает жизнь гонщика , помогая отыграть потерянные в них доли секунд , а с другой — добавляет головной боли командным инженерам.
ТРЕКШН-КОНТРОЛЬ
Не нужно быть семи пядей во лбу, чтобы на основании графика прийти к умозаключению: гонщик не перекладывает всю ответственность на «цифру », а пытается контролировать упр авление тягой лично (1). Именно поэтому он пользуется газом ступенчато: сходу поворачивает ручку на приличный угол , а затем , почувствовав проскальзывание заднего колеса , начинает » играть» с подачей топлива , пока резина не восстановит « держак », после чего вновь « открывается » на всю.
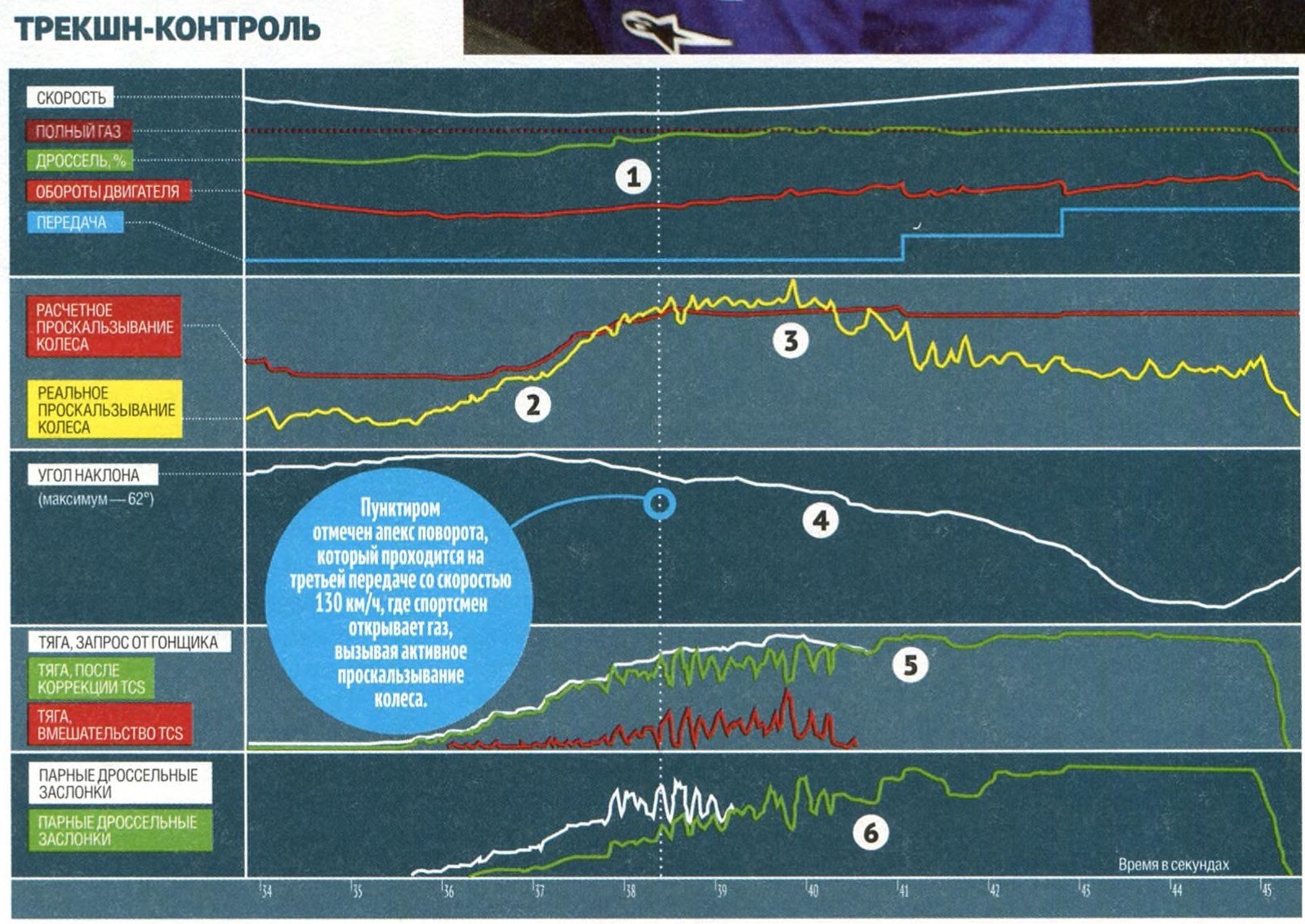
Очевидно еще и то , пока заднее колесо продолжает буксовать, угол наклона мотоцикла остается практически неизменным — пилот больше занят отлавливанием скольжений (4).В принципе, заднее колесо любой мощной двухколесной техники почти всегда находится в состоянии перманентного дрифта , особенно во время активного разгона. Поэтому электроника,в зависимости от предпочтений спортсмена ,настраивается таким образом , чтобы на пробуксовку в глубоком наклоне приходилось не более 2% вращения колеса , а в вертикальном положении — от 12 до 15 % (2).
Да и как иначе? Естественное желание гонщика ускориться и проявляемая при обращении с газом агрессия являются едва ли не главными причинами включения трекшн –контроля в работу и , как следствие , уменьшения передаваемой на заднее колесо тяги . И разнонаправленные кривые телеметрии с характерными всплесками великолепно демонстрируют мотоцикл пытается вырваться на волю , а цифрово й цербер — вернуть его на истинный путь (5).
Заметьте, что пилот в момент разгона даже и не думает сбавлять темп (3), потому как в курсе, что основная задача TCS – отслеживать скольжения заднего колеса при наклонах от 40 до 60 град и его вмешательство при вертикальном положении значения не имеет. К слову, трекшн-контроль, основываясь на собираемых с разных датчиков данных, корректирует тягу либо при помощи дроссельны х заслонок, либо путем изменения угла опережения зажигания,либо через отключение одного и более цилиндров, либо всем сразу (6).
Полный текст статьи см: https://sp-moto.com/wp-content/gallery/2020/02/ECU-или-электроника-MotoGPcompressed.pdf


